 400 025 3599
400 025 3599 




多軸系統可以通過串行運動學或并行運動學進行設計和構建 。在基于串行運動學原理的系統中,一個軸位于另一個軸的頂部,并且每個軸都獨立驅動,彼此獨立。笛卡爾機器人 是串行運動學設計的一個很好的例子。在并聯運動系統中,多根軸協同工作以移動公共平臺或末端執行器。一個軸的運動受到其他軸的約束,形成了一種閉環運動鏈。Delta機器人使用并行運動學。
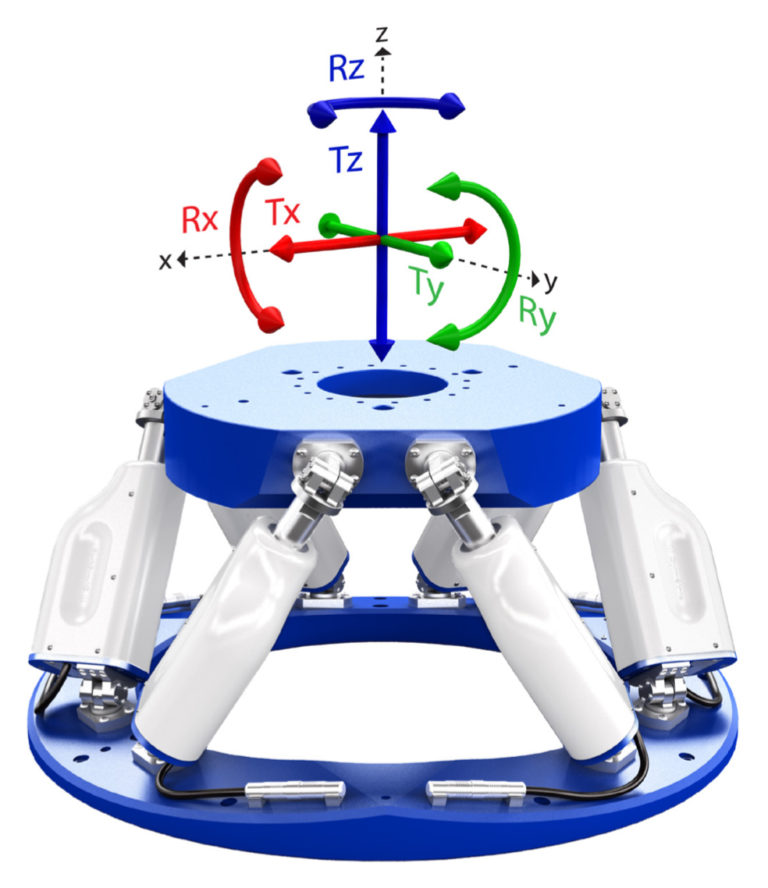
六足機器人是一種平行運動機構,具有六個自由度:X,Y,Z,側傾,俯仰和偏航。
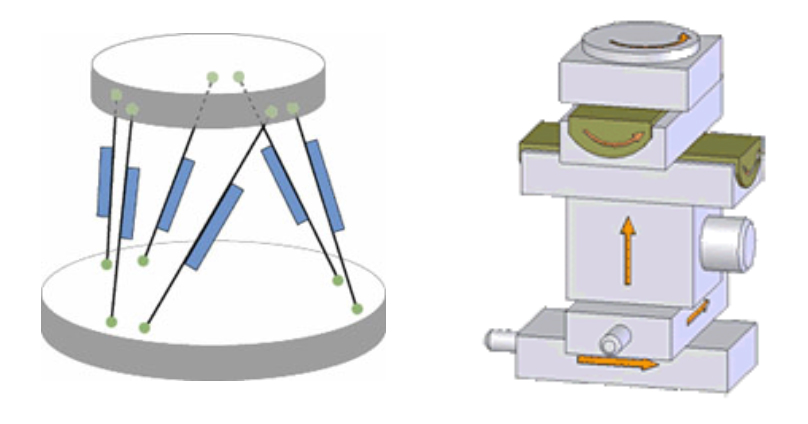
六腳機器人(左)是并聯運動的示例,而笛卡爾機器人(右)是串行運動的示例。
圖片來源:Physik Instrumente
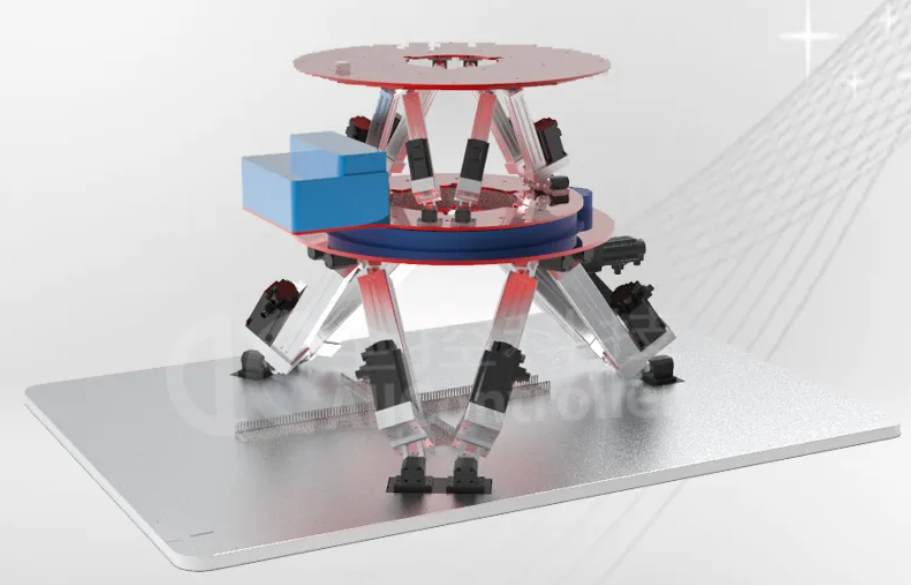
hexapod一詞在拉丁語中的意思是“六英尺”,而六足機器人恰好由六個致動器(也稱為“腿”)組成,這些致動器將固定平臺(通常是基座)與移動平臺(通常是頂部)連接起來。 )。支腿是拉桿式執行器,也稱為“棱柱形”執行器,可由滾珠絲杠,滾柱絲杠,線性電機甚至壓電設備驅動。球形或萬向節將執行器的末端連接到固定平臺和移動平臺。
一些制造商和專家將六足動物機器人簡稱為“六足動物”。但是,六足動物一詞也指六足節肢動物。為避免混淆,我們使用更具體的術語“六腳機器人”。

你知道蝴蝶是六足動物嗎?
圖片來源:Russ Ottens
六腳架機構的第一個實際應用是在輪胎測試和飛行模擬器設備中,今天它們仍然使用六腳架機器人。但是,六腳架機構也廣泛用于光子學和光學對準,機床設備的定位以及檢查系統。
六足機器人在多軸系統中是獨一無二的,因為它們允許用戶定義的所有六個運動軸的旋轉中心或樞軸點。 與串行運動機器人(笛卡爾,SCARA或6軸)相比,它們還具有更高的剛度和承載能力,因為它們的致動器或“支腿”共同作用以支撐負載。并行設計還意味著對每個執行器的誤差進行平均,而不是像在串行機器人中那樣進行累積。
你知道蝴蝶是六足動物嗎?
圖片來源:Russ Ottens
由于只有頂部平臺運動(電動機,齒輪箱和其他傳動部件是固定的),因此六腳機器人的慣性要比串行設計低得多,這使其非常適合于具有大負載的高動態運動,或具有光的亞微米精度負載。從集成的角度來看,六腳機器人更易于調試。控制器通常允許簡單地輸入樞軸點,而六腳機器人通常會放棄伺服調整,因為只有一個移動平臺并且系統固有的剛性很高。如果調整是必需的,所有六軸的參數是相同的,使得調整過程更容易和更快的比串行機器人。
六足機器人有時被稱為Stewart平臺,但是Stewart平臺最初被定義為在固定或移動平臺(或兩者)上成對連接的執行器。
使用反向運動學分析六足儀設備。換句話說,不是通過致動器運動來確定移動平臺的位移,而是基于平臺的位移來確定致動器運動。由于一組給定的致動器位移會導致40個不同的平臺位置,因此必須進行反向運動學分析,但是每個唯一的平臺位置僅對應一組致動器位移。
Stewart平臺是一種六腳機器人,其執行器在固定平臺或移動平臺(或兩者)上成對連接。
圖片來源:Wikipedia.org
六腳架設備的運動學特性也會引起奇異性,或者平臺無法控制且無法通過固定執行器的位移來唯一確定其位置的位置。(在極端情況下,奇異點可能會導致整個系統崩潰。)但是,六足機器人的用戶很少需要處理奇點問題,因為制造商將機器人的工作區域定義為不包含任何奇點的空間。
ps:“ Stewart平臺”一詞來自D. Stewart先生,他于1965年向英國機械工程師學會提出,將六腳架機構用作飛行模擬器。但是,斯圖爾特先生既不是六足機構的發明者,也不是第一個將六足機構用于實際應用的人。





 在線咨詢
在線咨詢 




